System Integration: Autonomous Racing Drone
Projects | | Links:
In preparation for the IMAV 2025 (International Micro Air Vehicle) competition, I joined the UPNA Drone Team to work on the development of high-performance autonomous racing drones. My primary focus was the hardware assembly and electrical validation of the team’s second competition unit, ensuring a robust and reliable platform for autonomous flight algorithms.
Introduction and Competition Goals
The IMAV competition challenges teams to design drones capable of navigating complex obstacle courses at high speeds autonomously. Reliability is paramount; a single loose connection or a reversed motor can lead to a catastrophic failure during the mission.
As the lead for the assembly of the second drone, my requirements were to ensure perfect electrical continuity, weight balance, and hardware-software synchronization. The goal was to deliver a “ready-to-fly” platform that the software team could use for testing their navigation and control models without hardware-related interruptions.
Selected Tools
Building a racing drone requires precision electronics and diagnostic tools:
- Soldering Station: Used for connecting the high-speed brushless motors to the Electronic Speed Controllers (ESC) and power management boards.
- Digital Multimeter: Essential for current measurement and verifying there were no short circuits before the first power-up.
- Precision Calipers: Used for validating component dimensions and ensuring the frame’s structural integrity.
- Configuration Software: Tools used to calibrate motor rotation directions and sensor alignment.
Hardware Assembly & Validation
The assembly process was divided into three critical stages, documented below:
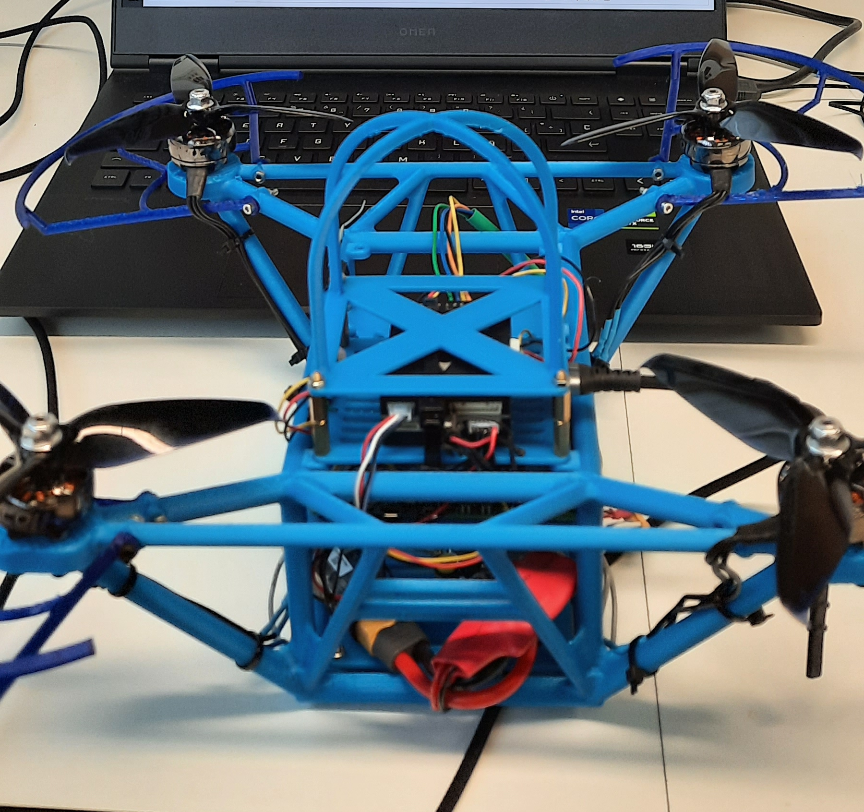
1. Electronics Integration
This stage involved the meticulous soldering of the power system and flight controller. I had to ensure that every joint could withstand the vibrations and high-G maneuvers typical of drone racing.
2. Directional Calibration
After the physical build, I performed a software-hardware validation to ensure each motor rotated in the correct direction. This step included mapping the motor order in the firmware to match the physical layout of the frame, which is crucial for the flight controller’s stability algorithms.
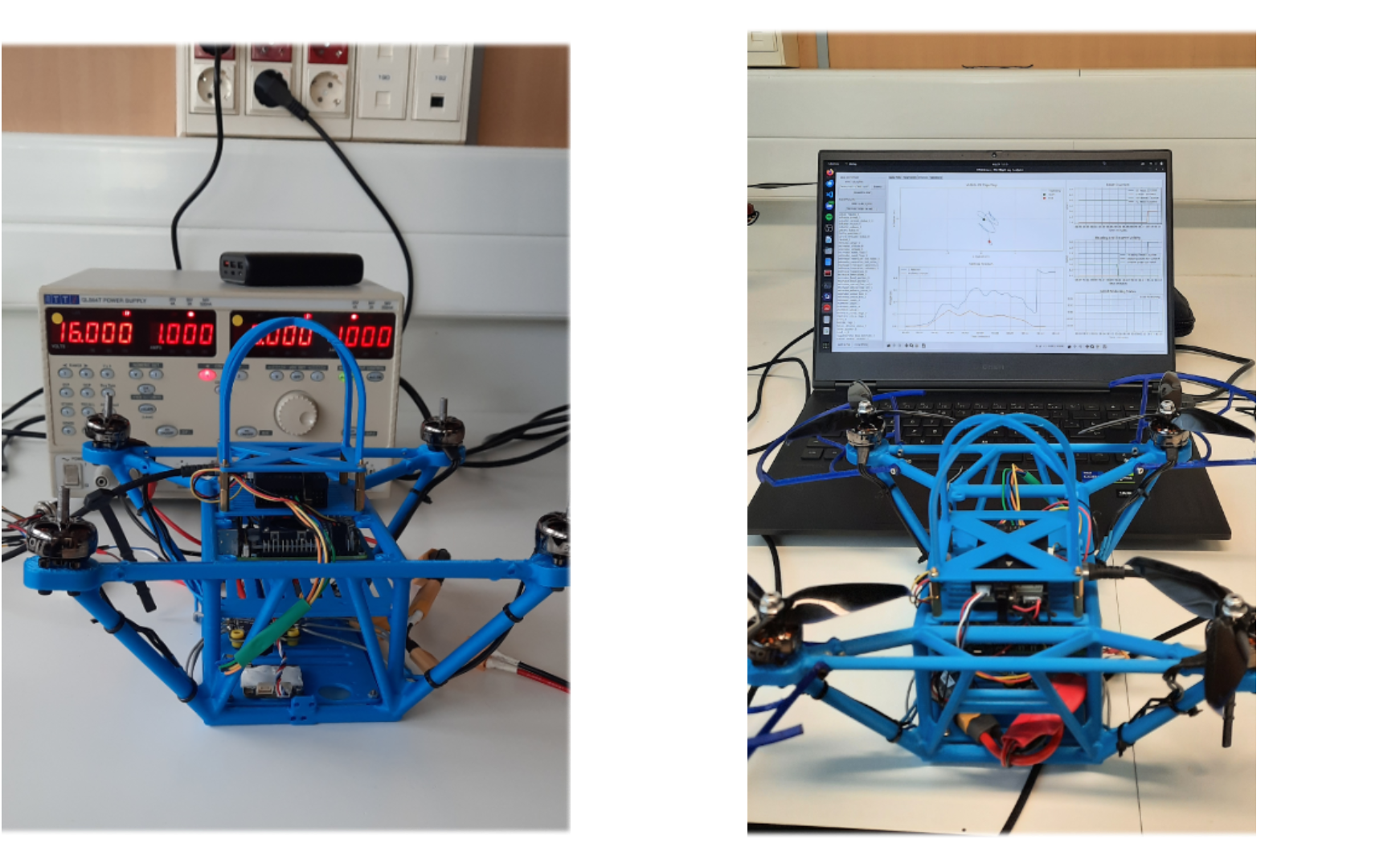
3. Power Systems & Dimensions
Using a multimeter, I verified the electrical integrity of the system under load. Additionally, I performed a dimensional validation to ensure the center of mass was correctly positioned, facilitating more efficient control for the autonomous navigation system.
Final Result
The quality of the assembly and the rigor of the pre-flight checks proved successful: the drone’s maiden flight was a success on the very first attempt. The platform demonstrated excellent stability and responsiveness, providing a reliable base for the team’s autonomous racing challenges.
This project allowed me to apply systems engineering principles to real-world hardware, emphasizing the importance of meticulous assembly and methodical validation in high-stakes robotic competitions.
